
联系人:单先生
服务热线:15901901738(微信同步) 15365656107
邮箱:cntoran@163.com
网址:www.cntoran.com
地址:江苏省盐城市盐南高新区文港南路75号
张家界悬臂式助力机械手伺服系统部件技术要求有以下4点:1.系统精度,伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,可概括为动态误差,稳态误差和静态误差三个方面组成。2.稳定性,供应悬臂式助力机械手伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够恢复到原来稳定状态的能力,或者当给系统一个新的输入指令后,系统达到新的稳定运行状态的能力。3.响应特性,响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率。响应速度与助力机械手许多因素有关,如计算机的运行速度,运动系统的阻尼和质量等。

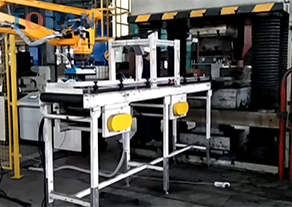
张家界悬臂式助力机械手已应用在汽车制造,家电视讯,金属制造工业铸造航空以及造纸,食品烟草,玻璃陶瓷,制药,化工石油等行业为生产的优化发挥着巨大的作用。供应悬臂式助力机械手通过检测吸盘或机械手末端夹具和平衡气缸内气体压力,气动助力机械手能自动识别机械手臂上有无载荷,并经气动逻辑控制回路自动调整平衡气缸内的气压,达到自动平衡的目的。工作时,重物犹如悬浮在空中,可避免产品对接时的碰撞。在气动助力机械手的工作范围内,操作人员可将其前后左右上下轻松移动到任何位置,人员本身可轻松操作。同时,气动助力机械手的气动回路还有防止误操作掉物和失压保护等连锁保护功能。

供应悬臂式助力机械手在使用过程中,有时会发生平衡故障。助力机械手平衡故障的现象与排除如下:张家界悬臂式助力机械手平衡故障发生时的不正常现象:按下“放松”按钮后,“夹紧气缸”张开并离开被夹工件的一刹那,助力机械手会猛地向上抬高一段距离,这往往会带动被夹工件一起非正常抬起。操作时正常情况为使用助力机械手将被夹工件放置到检测线上的随行托盘安装到位后,此时已不需要助力机械手悬臂承担被夹工件重量,按下“放松”按钮,助力机械手先由“加载”变为“空载”,之后助力机械手上的“夹紧气缸”夹爪张开并离开被夹工件。智能助力机械手平衡故障的现象说明助力机械手由“加载”转变为“空载”的时间太长,响应过慢,正常应该在“夹紧气缸”夹爪张开之前完成的“空载”在“夹紧气缸”夹爪张开之后才完成。

张家界悬臂式助力机械手是气动辅佐人力,是人工操纵的机械手。工作人员手动操作气动助力机械手完结机械手的上下运动和反转运动等动作,并通过操作气动开关完结夹具的夹持,从而进行工件的转移,移载,装配等作业。供应悬臂式助力机械手的操作十分简单方便,灵活性比较强,适合用于现代装配工业及加工中心、轿车装配等职业。使用该气动助力机械手能够减轻操作人员的劳动强度,完结转移大质量工件时操作轻便和定位准确,确保设备和操作人员的安全。气动助力机械手是由平衡装置、气动体系、安全体系和操作体系等四大部件组成。


服务热线:159-0190-1738
电子邮箱:cntoran@163.com
公司地址:江苏省盐城市盐南高新区文港南路75号

微信扫一扫





