
联系人:单先生
服务热线:15901901738(微信同步) 15365656107
邮箱:cntoran@163.com
网址:www.cntoran.com
地址:江苏省盐城市盐南高新区文港南路75号
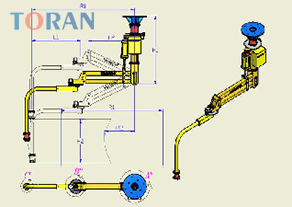
濰坊真空搬运机械手是一种新颖的、用于搬运物料的助力设备,特别适合用在一些具备精确定位和装配动作要求的应用场合。搬运助力机械手作为机械手的一种,搬运助力机械手的结构比较简单、重量比较轻、动作十分迅速,平稳可靠、搬运助力机械手而且还节能不污染环境,所以被广泛应用。专业真空搬运机械手可以巧妙地应用力的平衡原理,让工件在空中形成一种无重力化浮动状态,就是工件的重力被相应的气控系统所平衡,使操作者对工件实施搬运操作时只需很小的操作力。因为重物在被提升或下降时形成浮动状态,对于操作者而言,不需要熟练的点动按钮操作,徒手推拉重物,就可以把重物正确地放到空间中的任何位置。利用主机可以平衡物料重力的特性,再配上相应的抓取机械手和安装基座,我们就拥有了一套完整的“搬运助力机械手”系统。
专业真空搬运机械手在使用过程中,有时会发生平衡故障。助力机械手平衡故障的现象与排除如下:濰坊真空搬运机械手平衡故障发生时的不正常现象:按下“放松”按钮后,“夹紧气缸”张开并离开被夹工件的一刹那,助力机械手会猛地向上抬高一段距离,这往往会带动被夹工件一起非正常抬起。操作时正常情况为使用助力机械手将被夹工件放置到检测线上的随行托盘安装到位后,此时已不需要助力机械手悬臂承担被夹工件重量,按下“放松”按钮,助力机械手先由“加载”变为“空载”,之后助力机械手上的“夹紧气缸”夹爪张开并离开被夹工件。智能助力机械手平衡故障的现象说明助力机械手由“加载”转变为“空载”的时间太长,响应过慢,正常应该在“夹紧气缸”夹爪张开之前完成的“空载”在“夹紧气缸”夹爪张开之后才完成。

智能助力机械手的系统组成?真空搬运机械手生产厂家为您解决:1.一套完整的助力机械手装备关键由三部分构成:平衡吊主机、抓取夹具(或机械手)及安裝结构。2.濰坊真空搬运机械手主机是保持物料(或工件)智能助力机械手在空中无重力化浮动状态的主体设备。3.智能助力机械手则是实现钢件抓取,并完成用户相应搬运和装配规定的设备。智能助力机械手安装结构则是依据用户服务区域及现场状况要求以支承整套设施的组织。由于智能助力机械手具有无重力化、精确形象化、操作便捷、安全高效等特性,“平衡吊”广泛应用于现代工业中的物料移载、低频搬运、精准定位、部件装配等场所。
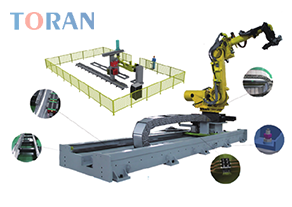
专业真空搬运机械手配件技术特征如下:1、产业化部件:成熟的产业化生产部件可提供良好的稳定性和可靠性。2、模块化结构:真空搬运机械手生产厂家大量减少非标设计与制造,很大程度上限度的减少设计与实施的风险。3、优良的驱动与控制系统:具有标准机械手的通用功能,如示教等。4、自动化集料与码垛:实现全工序的自动衔接,可实现无人工干预的全自动运行。5、经济性:产业化的部件组合,可大幅度的减少设施本钱。6、可计算的工期:模块化的结构还可以大大减少试制周期,使实施过程更加可控。7、工件的在线检测:确保产品质量。

濰坊真空搬运机械手的操作使用前应做好以下准备工作:1、系统通气前,先检查各操作开关方向是否正确,应将智能助力机械手远离设备和人员,以免智能助力机械手的手臂突然翘起造成人员受伤等事故。打开开关接通气源,系统通气时三个关节的制动气缸应均为制动状态,通气后,将制动开关旋开,各关节即可在指定的范围内旋转。2、专业真空搬运机械手调整平衡时,先将压力降为“0”,缓慢顺时针旋转,这时,压力表读数缓缓上升,助力机械手缓缓升起,当人工用力将助力机械手抬起时升起和下拉的力相当时,表示该状态处于平衡状态。3、智能助力机械手在工作期间不得随意关断气源。不使用时,应将智能助力机械手旋转到远离其它设备的位置,再将夹具下降到低位。气源关断时应注意检查智能助力机械手,将其操作按钮全部恢复到“关闭”状态。

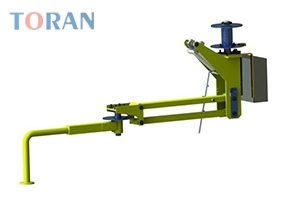
专业真空搬运机械手作为早期的工业助力机械手和现代助力机械手,智能助力机械手可以代替繁重的劳动,实现生产的机械化和自动化,智能助力机械手可以在有害环境中操作,保护人身安全。因此,智能助力机械手广泛应用于机械制造、冶金、电子、轻工、原子能等行业。濰坊真空搬运机械手广泛应用于工业企业。从组装、测试、搬运到自动焊接、自动喷涂、自动冲压,采用相应的辅助机械手代替人工,减少了人员的劳动。在日常使用中,当智能助力机械手遇到故障时,在维护增压臂时,应注意以下几点,以避免危险。先进制造业是制造业具创新性和成果的领域。智能助力机械手也是价值链中的高利润、高附加值领域。是制造业的发展方向。


服务热线:159-0190-1738
电子邮箱:cntoran@163.com
公司地址:江苏省盐城市盐南高新区文港南路75号

微信扫一扫





