
联系人:单先生
服务热线:15901901738(微信同步) 15365656107
邮箱:cntoran@163.com
网址:www.cntoran.com
地址:江苏省盐城市盐南高新区文港南路75号
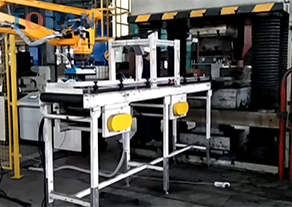
郑州搬运机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。供应搬运机械手作为近几十年发展起来的一种高科技自动化生产设备,工业机器人、机械手在现代制造技术领域中扮演了极其重要的角色,其能自动化定位控制并可重新编程序以变动的多功能机器,并有多个自由度,可用来搬运物体以完成在各个不同环境中工作。

郑州搬运机械手是气动辅佐人力,是人工操纵的机械手。工作人员手动操作气动助力机械手完结机械手的上下运动和反转运动等动作,并通过操作气动开关完结夹具的夹持,从而进行工件的转移,移载,装配等作业。供应搬运机械手的操作十分简单方便,灵活性比较强,适合用于现代装配工业及加工中心、轿车装配等职业。使用该气动助力机械手能够减轻操作人员的劳动强度,完结转移大质量工件时操作轻便和定位准确,确保设备和操作人员的安全。气动助力机械手是由平衡装置、气动体系、安全体系和操作体系等四大部件组成。

供应搬运机械手以其“平衡重力”使得运动平滑,操作省力、简单,装配方便、快捷,定位准确,大大减轻了员工的劳动强度,提高了工作效率。搬运机械手价格在进行智能助力机械手设计时,要遵循下述原则;1、应尽可能使智能助力机械手的各关节轴相互平行。2、智能助力机械手的结构尺寸应满足工作空间的要求。3、为了提高智能助力机械手的运动速度与控制精度,应在保证智能助力机械手有足够强度和刚度的条件下,尽可能在结构上、材料上设法减轻手臂的重量,力求选用高强度的轻质材料,通常选用高强度铝合金制造助力机械手。4、智能助力机械手各关节的轴承间隙要尽可能小,以减小机械间隙所造成的运动误差。5、智能助力机械手的手臂相对其关节回转轴应尽可能在重量上平衡,这对减小电机负载和提高助力机械手运动的响应速度是非常有利的。6、智能助力机械手在结构上要考虑各关节的限位开关和具有一定缓冲能力的机械限位块,以及驱动装置,传动机构及其它元件的安装。

郑州搬运机械手的系统安全性有以下几点:1、智能助力机械手是配有安全控制系统的,在操作的时候,系统不会操作不当而改变负载或者空载压力,因此助力机械手不会快速上升或者下降而对人身、设备和产品产生伤害。2、供应搬运机械手的系统当中配备了失气保护装置,如果供气源断气,主机臂杆不能动作,机械手将停止作业,这样将会有效的避免人员受到伤害。3、智能助力机械手配备有安全的错误操作保护装置,以便防止人员的错误操作对设备和人员造成伤害。4、智能助力机械手是带有负载压力表的,能够很好的反应空气压缩的工作状况。5、智能助力机械手还带有负载显示器,能够很清楚的指示负载状态,让操作者明白,这时的物料是否被提起或者被卸载。

搬运助力机械手的本身构成结构特性,在机械制造业也存有下列优点:1、供应搬运机械手旋转半径大。在钢结构、焊钳及变压器工艺布局较聚集的地区,使用时可防止与空中设施干预。2、压力保护逐步完善。在气动阀门断气后,储气罐中的空气压缩也慢慢降低,因为搬运助力机械手和夹具本身作用力的作用,气压力不足以保持其平衡状态,也会在重力的作用下缓慢下降。在下降的流程中,假如不采取有效,就很容易发生撞击,使搬运助力机械手元件或钢件毁坏。搬运机械手价格为防止这种情况产生,需要在空气压缩主气动阀门断掉以前先将机器人的气源断开,使其减少到少位置固定,在下次送气后打开机械手的气阀并在机械手到达平衡位置后才正常使用。3、便于养护维护。必须定期维护搬运助力机械手上安装的气动元件、回路中的接头和管道及压力表等易损件,防止影响正常使用。

供应搬运机械手可完成重物抓取搬运翻转对接微调角度等三维空间移载动作。为物料上下线和生产部品组装提供极理想的助力搬运和组装工具。郑州搬运机械手在降低作业劳动强度提供物料安全搬运的同时,也可满足特殊环境如防爆车间,人员无法进入的危险场所提供系统解决方案。搬运助力机械手已应用在汽车制造,家电视讯,金属制造I业铸造航空以及造纸,食品烟草,玻璃陶瓷,制药,化工石油等行业为生产的优化发挥着巨大的作用。


服务热线:159-0190-1738
电子邮箱:cntoran@163.com
公司地址:江苏省盐城市盐南高新区文港南路75号

微信扫一扫





