
联系人:单先生
服务热线:15901901738(微信同步) 15365656107
邮箱:cntoran@163.com
网址:www.cntoran.com
地址:江苏省盐城市盐南高新区文港南路75号

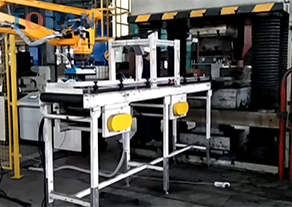
供应机器人第七轴可完成重物抓取搬运翻转对接微调角度等三维空间移载动作。为物料上下线和生产部品组装提供极理想的助力搬运和组装工具。助力机械手在降低作业劳动强度提供物料安全搬运的同时,也可满足特殊环境如防爆车间,人员无法进入的危险场所提供系统解决方案。十堰机器人第七轴在机械手臂的工作范围内,操作人员可将其前后左右上下轻松移动到任何位置,人员本身可轻松操作。同时,气动回路还有防止误操作掉物和失压保护等连锁保护功能。非常重要的一点是,气动平衡吊整机无须电控系统,只需压缩空气和真空源(视工作情况)即可工作,非常方便。
十堰机器人第七轴的操作使用前应做好以下准备工作:1、系统通气前,先检查各操作开关方向是否正确,应将智能助力机械手远离设备和人员,以免智能助力机械手的手臂突然翘起造成人员受伤等事故。打开开关接通气源,系统通气时三个关节的制动气缸应均为制动状态,通气后,将制动开关旋开,各关节即可在指定的范围内旋转。2、供应机器人第七轴调整平衡时,先将压力降为“0”,缓慢顺时针旋转,这时,压力表读数缓缓上升,助力机械手缓缓升起,当人工用力将助力机械手抬起时升起和下拉的力相当时,表示该状态处于平衡状态。3、智能助力机械手在工作期间不得随意关断气源。不使用时,应将智能助力机械手旋转到远离其它设备的位置,再将夹具下降到低位。气源关断时应注意检查智能助力机械手,将其操作按钮全部恢复到“关闭”状态。

供应机器人第七轴总动作时间应该小于或着等于工作的拍节,加入两个动作在同时进行,这就要按时间长的计算,分配各动作时间应考虑以下要求:1、给定的运动时间需要比电气、液压元件的执行时间大;2、十堰机器人第七轴伸缩运动的速度要大于回转运动的速度,因为回转运动的惯性通常会大于伸缩运动的惯性。在满足工作拍节要求的条件下,应尽量选取较底的运动速度。助力机械手的运动速度与臂力、行程、驱动方式、缓冲方式、定位方式都有很大关系,应根据具体情况加以确定;3、在工作拍节短、动作多的情况下,常使几个动作同时进行,为此驱动系统要采取相应的措施,以保证动作的同步。

供应机器人第七轴可完成重物抓取搬运翻转对接微调角度等三维空间移载动作。为物料上下线和生产部品组装提供极理想的助力搬运和组装工具。十堰机器人第七轴在降低作业劳动强度提供物料安全搬运的同时,也可满足特殊环境如防爆车间,人员无法进入的危险场所提供系统解决方案。搬运助力机械手已应用在汽车制造,家电视讯,金属制造I业铸造航空以及造纸,食品烟草,玻璃陶瓷,制药,化工石油等行业为生产的优化发挥着巨大的作用。


服务热线:159-0190-1738
电子邮箱:cntoran@163.com
公司地址:江苏省盐城市盐南高新区文港南路75号

微信扫一扫





