
联系人:单先生
服务热线:15901901738(微信同步) 15365656107
邮箱:cntoran@163.com
网址:www.cntoran.com
地址:江苏省盐城市盐南高新区文港南路75号

黄山悬臂式助力机械手是一种新颖的、用于搬运物料的助力设备,特别适合用在一些具备精确定位和装配动作要求的应用场合。搬运助力机械手作为机械手的一种,搬运助力机械手的结构比较简单、重量比较轻、动作十分迅速,平稳可靠、搬运助力机械手而且还节能不污染环境,所以被广泛应用。专业悬臂式助力机械手可以巧妙地应用力的平衡原理,让工件在空中形成一种无重力化浮动状态,就是工件的重力被相应的气控系统所平衡,使操作者对工件实施搬运操作时只需很小的操作力。因为重物在被提升或下降时形成浮动状态,对于操作者而言,不需要熟练的点动按钮操作,徒手推拉重物,就可以把重物正确地放到空间中的任何位置。利用主机可以平衡物料重力的特性,再配上相应的抓取机械手和安装基座,我们就拥有了一套完整的“搬运助力机械手”系统。

黄山悬臂式助力机械手是一种新奇的、用以原材料运送并且省时省力的工具,搬运助力机械手可以运用其平衡原理巧妙的定位,是目前工业市场上比较青睐的一种器械。那么搬运助力机械手的系统安全系数怎样呢?悬臂式助力机械手厂家下面就来给大家简单介绍下:一、搬运助力机械手是装有安全系统控制的,在使用的时候,系统不易由于使用不当而更改负荷或是满载压力,因此搬运助力机械手不容易迅速升高或者降低而对人体、设施和产品造成伤害!二、搬运助力机械手的系统当中配置了失气保护器,假如供气源断气,主机臂杆不可以动作,搬运助力机械手将终止工作,这样将会合理的防止工作员受到伤害。三、配备有安全的操作失误保护器,便于避免工作员的操作失误对设施和工作员引起损伤,在还没有对安装状况进行确认前,即工件未安裝到位前,假如人员使用不正确,松开了按键,工件是不可以被卸载的。

黄山悬臂式助力机械手伺服系统部件技术要求有以下4点:1.系统精度,伺服系统精度指的是输出量复现输入信号要求的精确程度,以误差的形式表现,可概括为动态误差,稳态误差和静态误差三个方面组成。2.稳定性,专业悬臂式助力机械手伺服系统的稳定性是指当作用在系统上的干扰消失以后,系统能够恢复到原来稳定状态的能力,或者当给系统一个新的输入指令后,系统达到新的稳定运行状态的能力。3.响应特性,响应特性指的是输出量跟随输入指令变化的反应速度,决定了系统的工作效率。响应速度与助力机械手许多因素有关,如计算机的运行速度,运动系统的阻尼和质量等。

气动助力机械手规划的依据是什么,悬臂式助力机械手厂家带您了解怎样更好的运用:一、气动助力机械手的规划,1.黄山悬臂式助力机械手主要是用三部分组成:动力、主体、夹具组成。动力:动力分为两个部分气缸和储气罐,气缸:在作业时供给动力源来与夹具末端的负载进行平衡,到达轻松转移重物的功用;储气罐:防止气缸忽然不作业时,作为备用气源,保证作业时的重物不会忽然掉下来,归于安全措施部件。2.主体:主体主要由基座、支撑杆、旋转轴、刹车部件组成。基座:用来装置并固定整个气动助力机械手的本体,在作业时转移重物的平衡;支撑杆:支撑整个转移过程的稳定性;旋转轴:能够使重物在整个空间内轻松的上下左右搬动;刹车部件:气动助力机械手在不作业时,各旋转轴不会滚动,归于安全措施部件。

悬臂式助力机械手厂家运用气动助力机械手能够替代人从事单调、重复或繁杂的体力活,实现制造的专业化和智能化,替代人在有害的环境下的手工劳动,提升劳动条件,确保生命安全。20世纪30年代后期,选用气动助力机械手运放射性材料,人在安全室操纵助力机械手做好各类操作和试验。60年代以后,专业悬臂式助力机械手逐步推广到工业化生产单位,气动助力机械手用以在高溫、环境破坏严重的地方拿取钢件和装卸材料,气动助力机械手也做为数控车床的輔助设备在自动机床、自动化生产线和数控机床中运用,进行上下料或从刀库中取放道具并按固定系统软件拆换刀具等操作。
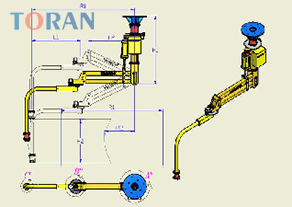
黄山悬臂式助力机械手是能自動平衡负载重量的助推装置,被它拿起的负荷,气动助力机械手无论负载的重量是怎样的转变,气动助力机械手都会快速感知马上响应自動平衡,负载如同失重漂浮在空气中相同,只要在操纵杆上施加单向力,专业悬臂式助力机械手就会按你的意愿升降位移,垂直轴线上的负载是根据以zhuanli技术为核心的自动平衡器和气缸组成的气控系统保持平衡的;负载的升降是通过气缸驱动保持的。气动助力机械手由主机、夹具和气控系统构成。气动助力机械手具有升降、回转平移作用,气动助力机械手根据负载工作区域规定,选择气动助力机械手参数;根据气动助力机械手负载工作过程规定的不同,设计专用夹具;气动助力机械手、夹具整体功能的实现由气控系统来进行。


服务热线:159-0190-1738
电子邮箱:cntoran@163.com
公司地址:江苏省盐城市盐南高新区文港南路75号

微信扫一扫





