
联系人:单先生
服务热线:15901901738(微信同步) 15365656107
邮箱:cntoran@163.com
网址:www.cntoran.com
地址:江苏省盐城市盐南高新区文港南路75号

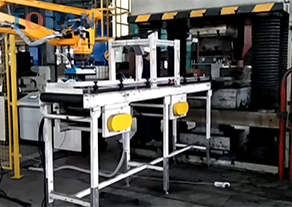
气动助力机械手规划的依据是什么,全自动机械手厂家带您了解怎样更好的运用:一、气动助力机械手的规划,1.淄博全自动机械手主要是用三部分组成:动力、主体、夹具组成。动力:动力分为两个部分气缸和储气罐,气缸:在作业时供给动力源来与夹具末端的负载进行平衡,到达轻松转移重物的功用;储气罐:防止气缸忽然不作业时,作为备用气源,保证作业时的重物不会忽然掉下来,归于安全措施部件。2.主体:主体主要由基座、支撑杆、旋转轴、刹车部件组成。基座:用来装置并固定整个气动助力机械手的本体,在作业时转移重物的平衡;支撑杆:支撑整个转移过程的稳定性;旋转轴:能够使重物在整个空间内轻松的上下左右搬动;刹车部件:气动助力机械手在不作业时,各旋转轴不会滚动,归于安全措施部件。
品牌全自动机械手总动作时间应该小于或着等于工作的拍节,加入两个动作在同时进行,这就要按时间长的计算,分配各动作时间应考虑以下要求:1、给定的运动时间需要比电气、液压元件的执行时间大;2、淄博全自动机械手伸缩运动的速度要大于回转运动的速度,因为回转运动的惯性通常会大于伸缩运动的惯性。在满足工作拍节要求的条件下,应尽量选取较底的运动速度。助力机械手的运动速度与臂力、行程、驱动方式、缓冲方式、定位方式都有很大关系,应根据具体情况加以确定;3、在工作拍节短、动作多的情况下,常使几个动作同时进行,为此驱动系统要采取相应的措施,以保证动作的同步。

品牌全自动机械手的应用程度已经成为决定企业间相互竞争和未来发展的重要衡量因素。淄博全自动机械手解决负责重复性高的人力资源,节约成本,提高产能。目前,在物流中的应用主要集中在装卸搬运与包装码垛两个作业环节,随着新型机器人技术的不断涌现,其他物流领域也出现了搬运机器人的应用案例。气动助力机械手的出现,不仅可以充分利用工作环境的空间,而且提高了物料的搬运能力,大大节约了装卸搬运过程中的作业时间,提高了装卸效率,是物流好帮手。
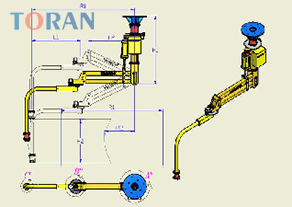
气动助力机械手可完成重物抓取搬运翻转对接微调角度等三维空间移载动作。淄博全自动机械手是为物料上下线和生产部品组装提供极理想的助力搬运和组装工具。助力机械手在降低作业劳动强度提供物料安全搬运的同时,也可满足特殊环境如防爆车间,全自动机械手厂家人员无法进入的危险场所提供系统解决方案。气动助力机械手已应用在汽车制造,家电视讯,金属制造工业铸造航空以及造纸,食品烟草,玻璃陶瓷,制药,化工石油等行业为生产的优化发挥着巨大的作用。


服务热线:159-0190-1738
电子邮箱:cntoran@163.com
公司地址:江苏省盐城市盐南高新区文港南路75号

微信扫一扫





