
联系人:单先生
服务热线:15901901738(微信同步) 15365656107
邮箱:cntoran@163.com
网址:www.cntoran.com
地址:江苏省盐城市盐南高新区文港南路75号

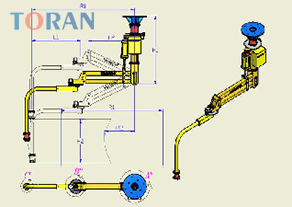
气动助力机械手规划的依据是什么,机器人第七轴厂家带您了解怎样更好的运用:一、气动助力机械手的规划,1.宣城机器人第七轴主要是用三部分组成:动力、主体、夹具组成。动力:动力分为两个部分气缸和储气罐,气缸:在作业时供给动力源来与夹具末端的负载进行平衡,到达轻松转移重物的功用;储气罐:防止气缸忽然不作业时,作为备用气源,保证作业时的重物不会忽然掉下来,归于安全措施部件。2.主体:主体主要由基座、支撑杆、旋转轴、刹车部件组成。基座:用来装置并固定整个气动助力机械手的本体,在作业时转移重物的平衡;支撑杆:支撑整个转移过程的稳定性;旋转轴:能够使重物在整个空间内轻松的上下左右搬动;刹车部件:气动助力机械手在不作业时,各旋转轴不会滚动,归于安全措施部件。
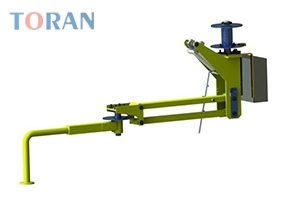
宣城机器人第七轴主要的功能部件,一、气动助力机械手的主机部分:可实现不同重量物料的重力平衡状态,气动助力机械手适用于物料的移载操作。专业机器人第七轴的刚性手臂可使机械手带工件越过障碍;系统可始终保持机械手头部的水平,发挥高作业性。水平臂可满足物料在相关场所进行横向放入、横向取出等动作要求。二、气路控制系统部分:气动助力机械手设置有元件保护盒,以保护主要精密气动元器件,避免操作时意外撞击及灰尘沉积。三、气动夹具部分:气动助力机械手的主机控制与夹具(机械手)集成为一体,方便操作者双手控制工件。

宣城机器人第七轴是能自動平衡负载重量的助推装置,被它拿起的负荷,气动助力机械手无论负载的重量是怎样的转变,气动助力机械手都会快速感知马上响应自動平衡,负载如同失重漂浮在空气中相同,只要在操纵杆上施加单向力,专业机器人第七轴就会按你的意愿升降位移,垂直轴线上的负载是根据以zhuanli技术为核心的自动平衡器和气缸组成的气控系统保持平衡的;负载的升降是通过气缸驱动保持的。气动助力机械手由主机、夹具和气控系统构成。气动助力机械手具有升降、回转平移作用,气动助力机械手根据负载工作区域规定,选择气动助力机械手参数;根据气动助力机械手负载工作过程规定的不同,设计专用夹具;气动助力机械手、夹具整体功能的实现由气控系统来进行。
在日常的使用中搬运助力机械手遇到故障,进行维修搬运助力机械手期间,机器人第七轴厂家需注意以下事项,以避免发生危险。1、不管是维修还是保养搬运助力机械手,请勿打开搬运助力机械手电源,防止发生意外事故。2、切勿在潮湿的地方使用搬运助力机械手,并保持搬运助力机械手工作区域的良好照明。3、更换模具期间,注意安全以免被搬运助力机械手撞伤;4、宣城机器人第七轴上升/下降,引进/引退,需要检查它的螺母是否有松脱;5、搬运助力机械手上下行程以及托架上面的螺丝是否有松脱;6、各气管接头与气管是否存在漏气;7、除了搬运助力机械手近接开关、电磁阀故障可自行检修外,其他都需要由专业训练人员来检修搬运助力机械手,否则切勿擅自更动搬运助力机械手导致意外发生。

宣城机器人第七轴是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。专业机器人第七轴作为近几十年发展起来的一种高科技自动化生产设备,工业机器人、机械手在现代制造技术领域中扮演了极其重要的角色,其能自动化定位控制并可重新编程序以变动的多功能机器,并有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
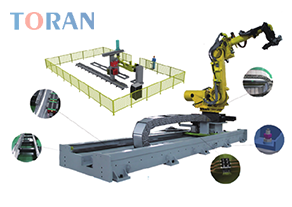
专业机器人第七轴可完成重物抓取搬运翻转对接微调角度等三维空间移载动作。为物料上下线和生产部品组装提供极理想的助力搬运和组装工具。宣城机器人第七轴在降低作业劳动强度提供物料安全搬运的同时,也可满足特殊环境如防爆车间,人员无法进入的危险场所提供系统解决方案。搬运助力机械手已应用在汽车制造,家电视讯,金属制造I业铸造航空以及造纸,食品烟草,玻璃陶瓷,制药,化工石油等行业为生产的优化发挥着巨大的作用。


服务热线:159-0190-1738
电子邮箱:cntoran@163.com
公司地址:江苏省盐城市盐南高新区文港南路75号

微信扫一扫





